how to reduce noise in rfid indoor tracking Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor en-vironments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness . Figure 2. Configure NFC Reading script step. When you execute your script, and it reaches this script step, FileMaker Go will display the standard iOS NFC scan dialog: Figure 3. FileMaker Go waiting for the NFC scan. When .
0 · Using Kalman Filters to Reduce Noise fr
1 · Optimizing indoor localization precision:
2 · Mobile target indoor tracking based on
3 · Cleansing indoor RFID tracking data
4 · Cleansing Indoor RFID Tracking Data
Jason Enney is the primary contact at Sound Radio Company Complete Auto Repair. Sound Radio Company Complete Auto Repair generates approximately 500,000 - 999,999 in revenue .
Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor en-vironments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness hinder RFID data querying and analysis at . The Radio-Frequency Identification (RFID) technology has been increasingly .
Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor en-vironments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness . The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor environments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness hinder RFID data querying and analysis at higher levels.Download figure: Standard image High-resolution image Let (X O, Y O) be the coordinates of the object/RFID tag.The tag response signal phases from one questioning to the next are recorded. In relation to the first response, the phase varies characteristically across a given distance for a particular tag position at the moment of the first reading.
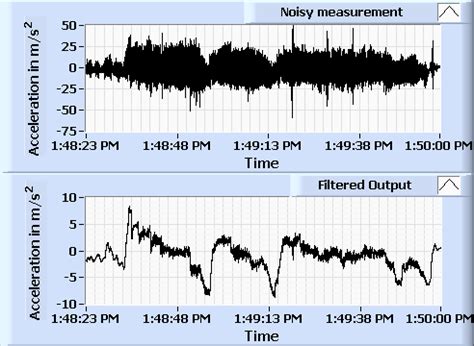
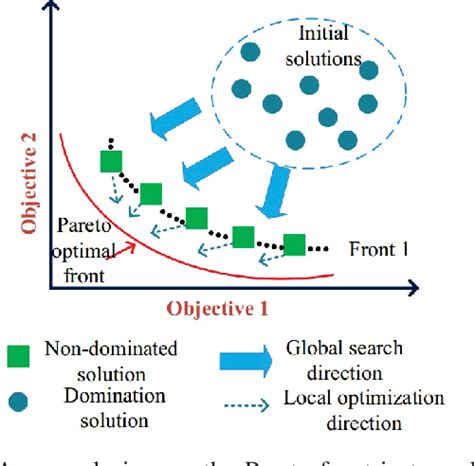
A set of experiments was devised and executed in order to assess the eficiency of Kalman Filters in reducing noise from a location system based on RFID UWB (in this case, the Ubisense RTLS commercial platform was used). In this paper, we propose a Multi-Direction Weight Position Kalman Filter (MDWPKF) for mobile target tracking. The novel MDWPKF combines the Multi-Direction data collection method, with Standard Kalman Filter and fingerprint matching algorithm to achieve the signal fluctuation reduction, noise removal and 2D fingerprint mapping. In this paper, we proposed a novel noise mitigation solution integrating the low-cost localization scheme with one mobile RFID reader. We designed a filter algorithm to remove the influence of abnormal data. In the following section, we will propose our RFID-based mobile object tracking system and elaborate how we exploit the node’s presence information from RFID sensing to implement range-free tracking and achieve acceptable accuracy, using the extremely limited resource and capability at RFID tags/readers.
Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor environments for object tracking and monitoring. However, the uncertain characteristics of.Using Kalman Filters to Reduce Noise from RFID - ProQuest. Nowadays, there are many technologies that support location systems involving intrusive and nonintrusive equipment and also varying in terms of precision, range, and cost.
The resulting IR-MHMM based RFID data cleansing approach is able to recover missing readings and reduce cross readings with high effectiveness and efficiency, as demonstrated by extensive.Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor en-vironments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness . The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor environments for object tracking and monitoring. However, the uncertain characteristics of RFID data, including noise and incompleteness hinder RFID data querying and analysis at higher levels.
Download figure: Standard image High-resolution image Let (X O, Y O) be the coordinates of the object/RFID tag.The tag response signal phases from one questioning to the next are recorded. In relation to the first response, the phase varies characteristically across a given distance for a particular tag position at the moment of the first reading.A set of experiments was devised and executed in order to assess the eficiency of Kalman Filters in reducing noise from a location system based on RFID UWB (in this case, the Ubisense RTLS commercial platform was used).
In this paper, we propose a Multi-Direction Weight Position Kalman Filter (MDWPKF) for mobile target tracking. The novel MDWPKF combines the Multi-Direction data collection method, with Standard Kalman Filter and fingerprint matching algorithm to achieve the signal fluctuation reduction, noise removal and 2D fingerprint mapping. In this paper, we proposed a novel noise mitigation solution integrating the low-cost localization scheme with one mobile RFID reader. We designed a filter algorithm to remove the influence of abnormal data. In the following section, we will propose our RFID-based mobile object tracking system and elaborate how we exploit the node’s presence information from RFID sensing to implement range-free tracking and achieve acceptable accuracy, using the extremely limited resource and capability at RFID tags/readers.
Using Kalman Filters to Reduce Noise fr
Abstract. The Radio-Frequency Identification (RFID) technology has been increasingly deployed in indoor environments for object tracking and monitoring. However, the uncertain characteristics of.Using Kalman Filters to Reduce Noise from RFID - ProQuest. Nowadays, there are many technologies that support location systems involving intrusive and nonintrusive equipment and also varying in terms of precision, range, and cost.
smart parker card qeii
Optimizing indoor localization precision:
Mobile target indoor tracking based on
Near-Field Communication (NFC) is a radio-based contactless peer-to-peer .
how to reduce noise in rfid indoor tracking|Optimizing indoor localization precision: